
Voici une petite mise en scène que j’ai inventée fin d’année 2022-2023 avec mes élèves de 3e année… Le but de ce projet est de coder parallèlement le robot Spike et le robot Tello afin de les amener à différents endroits de la classe. Dans l’histoire, les 2 robots sont sur Mars, le Tello joue le rôle de Ingenuity et doit ouvrir le chemin à Perseverance (interprété par Spike). Ainsi le premier survole le chemin et est suivi par le 2e qui parcours le même trajet en roulant.
Disposition de la classe
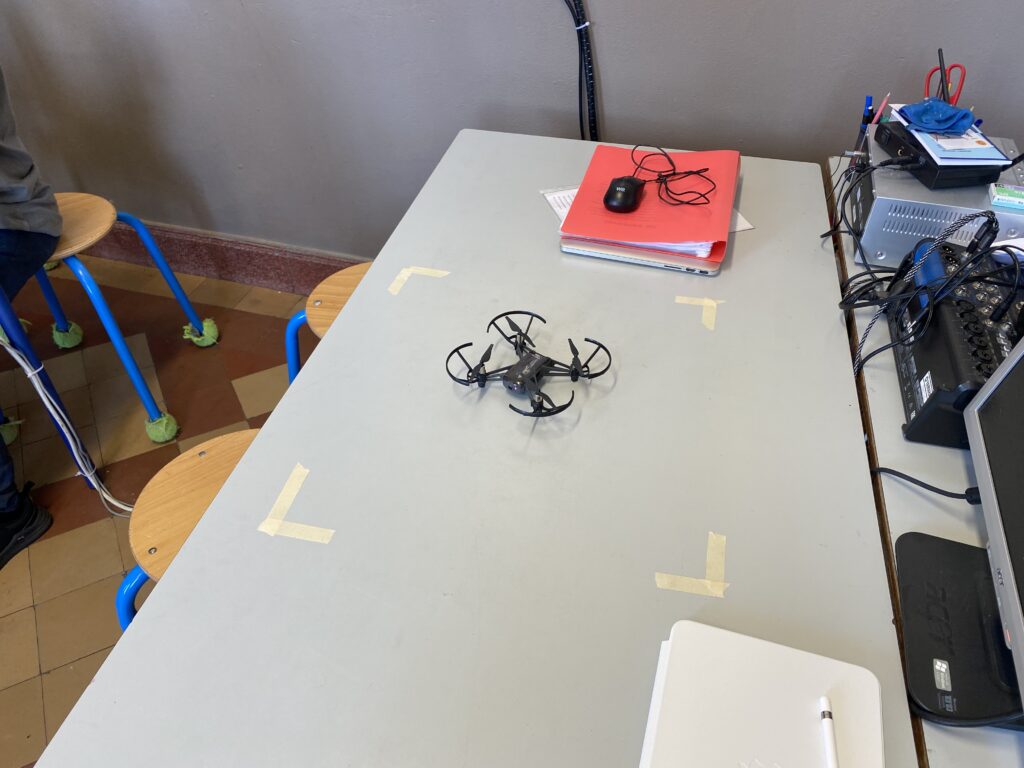
La disposition du site de décollage et des différents sites d’atterrissage ont été choisis pour proposer des difficultés croissantes aux enfants. Ainsi la première base est plus facile à atteindre que la 2e et ainsi de suite.
Matériel nécessaire
- 1 robot Spike
- 1 robot Tello
- 1 ordinateur (pour programmer Tello)
- 1 ordinateur / 1 tablette (pour programmer Spike)
- Du papier collant de couleur (pour tracer les zones)
Compétences de FMTTN abordées
Concevoir un algorythme pour résoudre un problème simple.
—> Concevoir un logigramme séquentiel de déplacement. (Compétence P5, p.50 du référentiel FMTTN)
—> Concevoir un logigramme intégrant une boucle et une condition. (Compétence P6, p.56 du référentiel FMTTN)
Concevoir un programme pour résoudre un problème simple.
—> Traduire un logigramme séquentiel de déplacement en langage de programmation, le tester et le déboguer. (Compétence P5, p.50 du référentiel FMTTN)
—> Traduire un logigramme intégrant une boucle et une condition, en langage de programmation, le tester et le déboguer (Compétence P6, p.56 du référentiel FMTTN)
Autres compétences abordées
Lire, interpréter des représentations de l’espace et les confronter au réel.
—> Repérer, sur le plan local de l’environnement proche élaboré sur quadrillage, des points de repère observés lors d’un déplacement et y indiquer l’itinéraire suivi. (Compétence P3, p.49 du référentiel de mathématiques)
—> Tracer sur un plan élaboré selon un quadrillage codé, un itinéraire effectué en respectant au moins quatre points de repère pertinents identifiés. (Compétence P4, p.64 du référentiel de mathématiques)
—> Tracer, sur un plan élaboré selon un quadrillage codé, un itinéraire à partir des points de départ et d’arrivée définis, en respectant au moins quatre points de repère pertinents identifiés. Se déplacer dans l’espace 3D en suivant un trajet donné sur un plan. (Compétence P5, p.79 du référentiel mathématiques)
—> Verbaliser avec précision, un itinéraire à partir des points de départ et d’arrivée définis, en respectant au moins quatre points de repère pertinents identifiés. Se déplacer dans l’espace 3D en suivant un trajet donné sur un plan. (Compétence P6, p.94 du référentiel de mathématiques)
Articuler, en situations significatives, l’estimation d’une grandeur, son mesurage (avec les références et les outils adéquats) et l’appréciation du résultat.
—> Rassembler et utiliser des instruments de mesure adaptés et pertinents de longueur pour mener à bien une tâche. (Compétence P3, p.54 et P4, p.69 du référentiel de mathématiques)
Détails de la leçon
Étape 1 : Découverte des robots et des principales briques de programmation
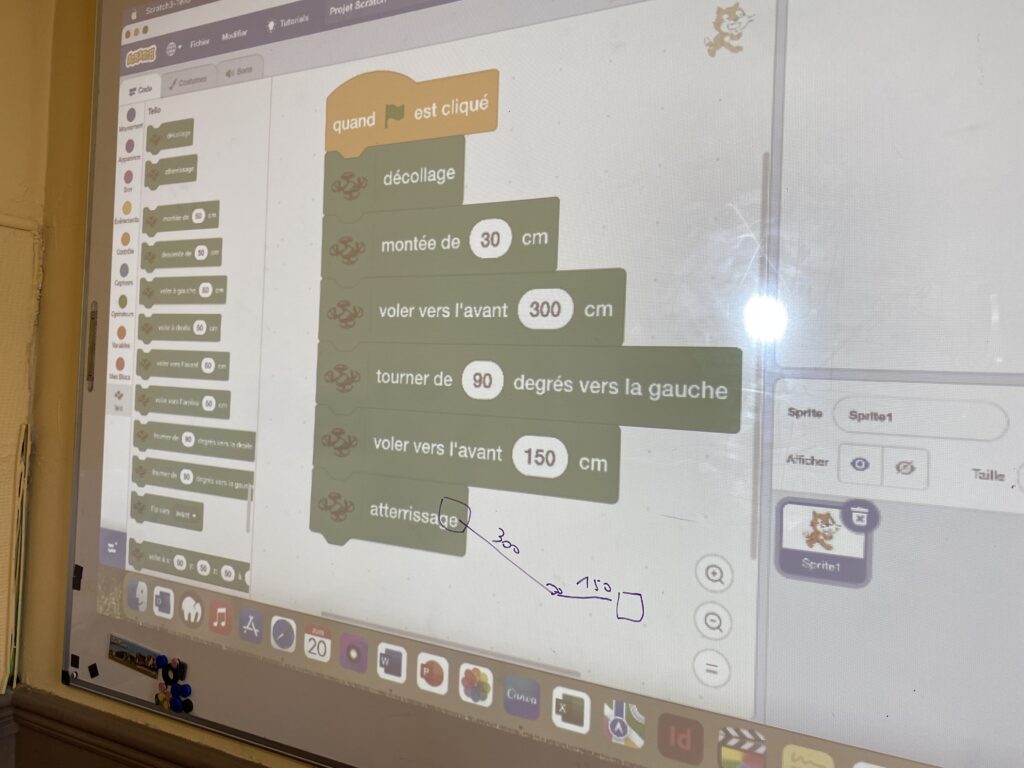
Les enfants découvrent le robot ainsi que ses caractéristiques techniques (batterie, possibilités, ..) Ils découvrent également les briques de programmation à disposition. Le Spike se programme dans l’application « Lego Spike » tandis que le Tello se programme dans Scratch grâce à l’extension Tello.
Les enfants font alors différents tests sur les robots :
Pour le Tello :
– Le faire décoller, attendre 2 secondes et puis atterrir;
– Le faire décoller, avancer de 10cm et atterrir;
– Le faire décoller, tourner sur lui-même et atterrir.
Pour le Spike :
– Le faire avancer en avant et en arrière;
– Le faire tourner à gauche et à droite.
Ces étapes peuvent être travaillées au préalable sur Scratch à l’aide du sprite de Ingenuity et d’un fond d’écran approprié, afin que les enfants comprennent bien la manœuvre à effectuer avec le robot.
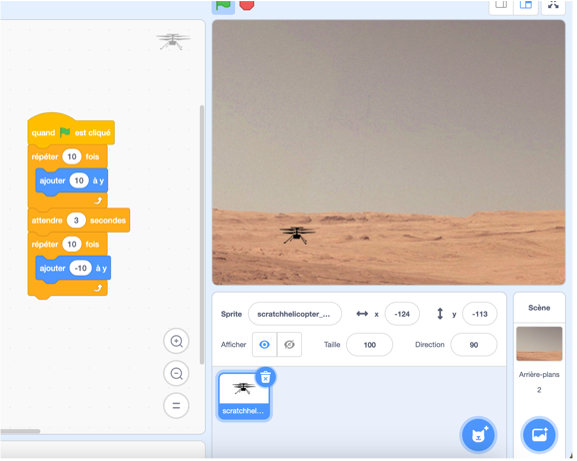
Il est intéressant de montrer les vidéos des « vrais » robots sur Mars à ce moment de la leçon (Premier vol où Ingenuity monte et descend et ensuite un vol où ils se déplacent)
Étape 2 : Réalisation du plan des voyages des robots
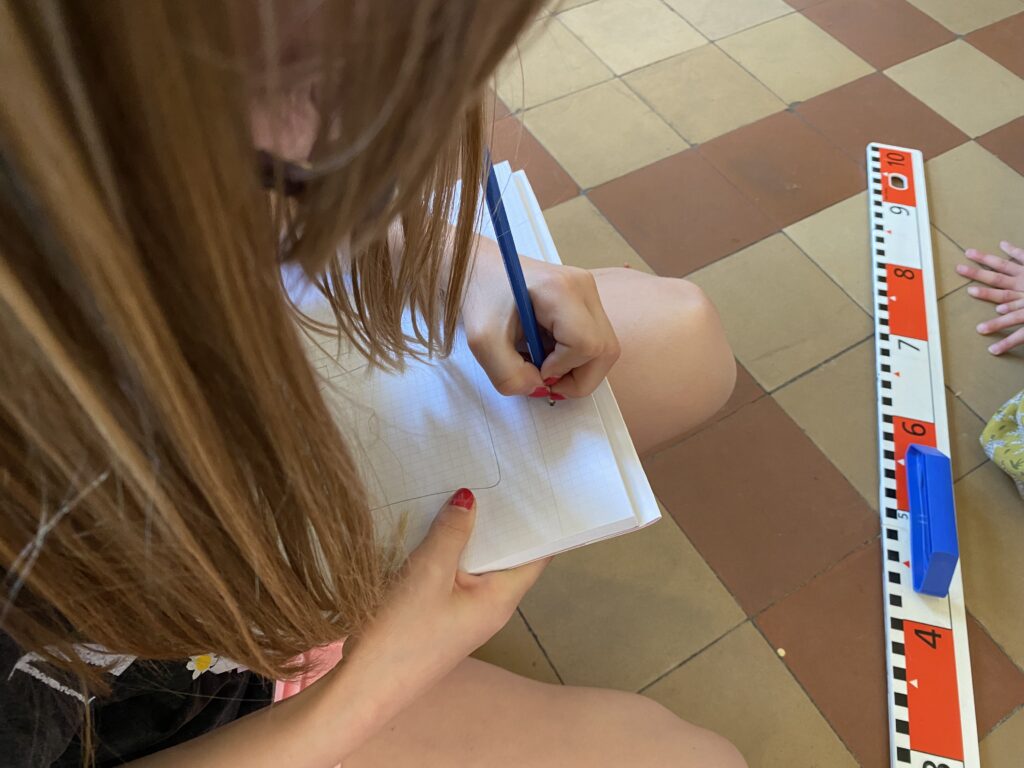
Par équipe, les enfants réalisent le plan des différents voyages du robot. Ils prennent également les mesures. Le Tello peut se déplacer en ligne droite mais il faut tenir compte des différentes altitudes de l’appareil. Le Spike quant à lui doit éviter les objets au sol mais son altitude ne change pas.
Durant cette étape, une progression peut être réalisée… (voir copmpétences de mathématiques)
– Le plan tracé est donné aux P3 avec les trajets déjà indiqués,
– Le plan seul est donné aux P4 qui doivent tracer les trajets,
Une feuille vierge est donnée aux P5 qui doivent réaliser le plan et les trajets,
Une feuille vierge est donnée aux P6 avec des indications (par rapport aux points de repère de la classe) pour eux repérer les chemins à emprunter.

Étape 3 : Codage du robot
En groupe de 2 ou 3, les enfants codent leur robot. La consigne est que le robot doit arriver dans la zone d’atterrissage en 1 seule fois. S’il s’arrête trop loin de la zone, il sera remis au point de départ et le code devra être revu. Une petite marge d’erreur est tolérée pour le Tello car son vol est moins uniforme que celui du Spike et ses déplacements sont plus imprécis. (durant ma phase de tests, j’ai laissé 50 à 60cm de tolérance tout autour de la zone prévue.)
Le groupe du Tello a cependant moins de possibilités d’essais car la batterie s’use plus rapidement. Chaque déplacement doit donc être fait en 3 essais maximum.


Note : Cette activité a été conçue il y a peu de temps… Je n’ai pour le moment fait que des tests avec des groupes en P3, P4 et P5. Les résultats sont prometteurs et je ne manquerai pas d’aller plus loin l’an prochain !