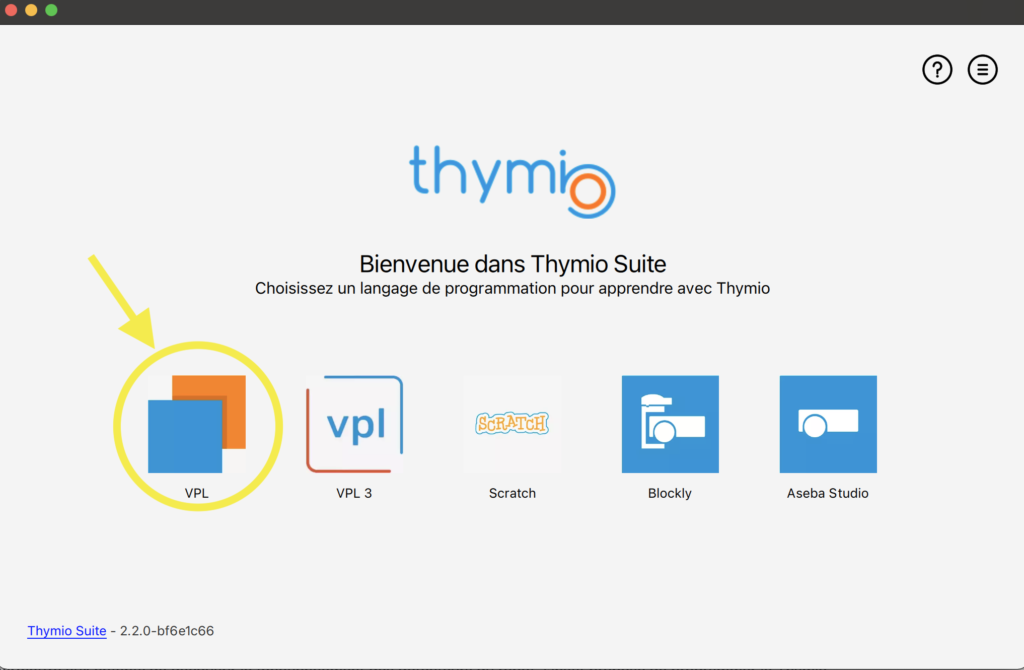
Nous allons ici nous intéresser à la programmation du Thymio de façon assez simple, en VPL (Virtual Programing Language) Nous essayerons de programmer des changements de couleurs sur le robot avant de tenter de le manoeuvrer à l’aide des boutons directionnels sur le dessus du Thymio.
Le public cible : 3e ou 4e année primaire (mais adaptable en P5 et P6)
Compétence travaillée : Concevoir un algorithme pour résoudre un problème simple.
Le matériel nécessaire : Il vous faudra 1robot Thymio pour 2 élèves
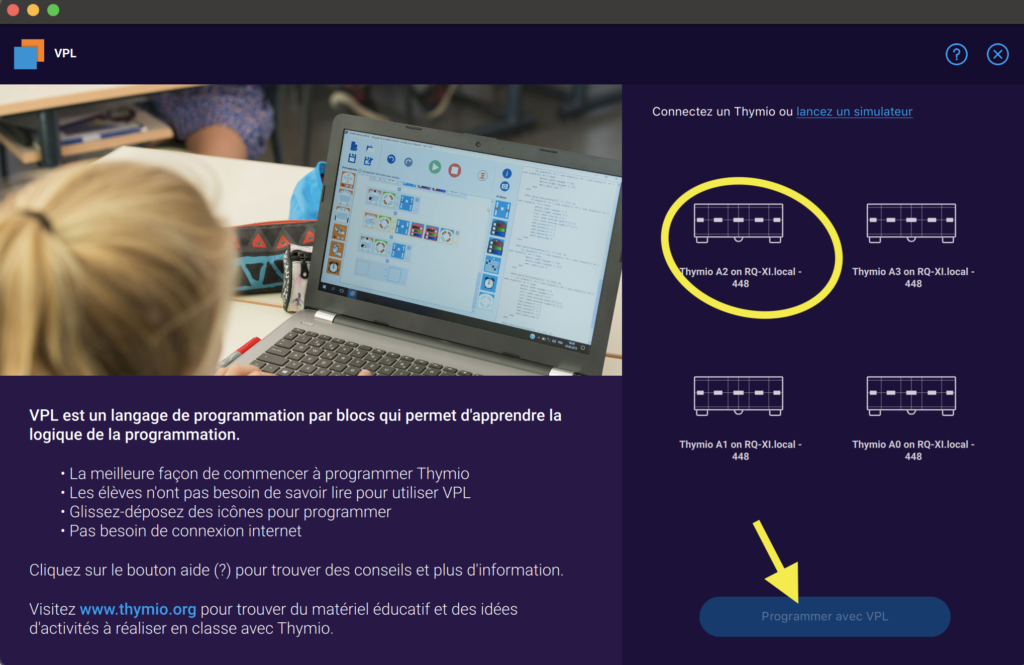
Le déroulement de la leçon :Les enfants se placent par groupe de 2 ou 3 élèves (suivant le groupe classe) et reçoivent un robot Thymio par groupe. La première consigne est d’ouvrir le programme VPL sur l’ordinateur et de sélectionner le robot reçu.
Ensuite, on découvre comment allumer les couleurs du Thymio à l’aide des éléments du programme. Le but ici étant d’en arriver à l’association du couple « évènement » / « action ». Je propose souvent cela en disant « Quand il se passe…. (l’évènement), je fais … (action)
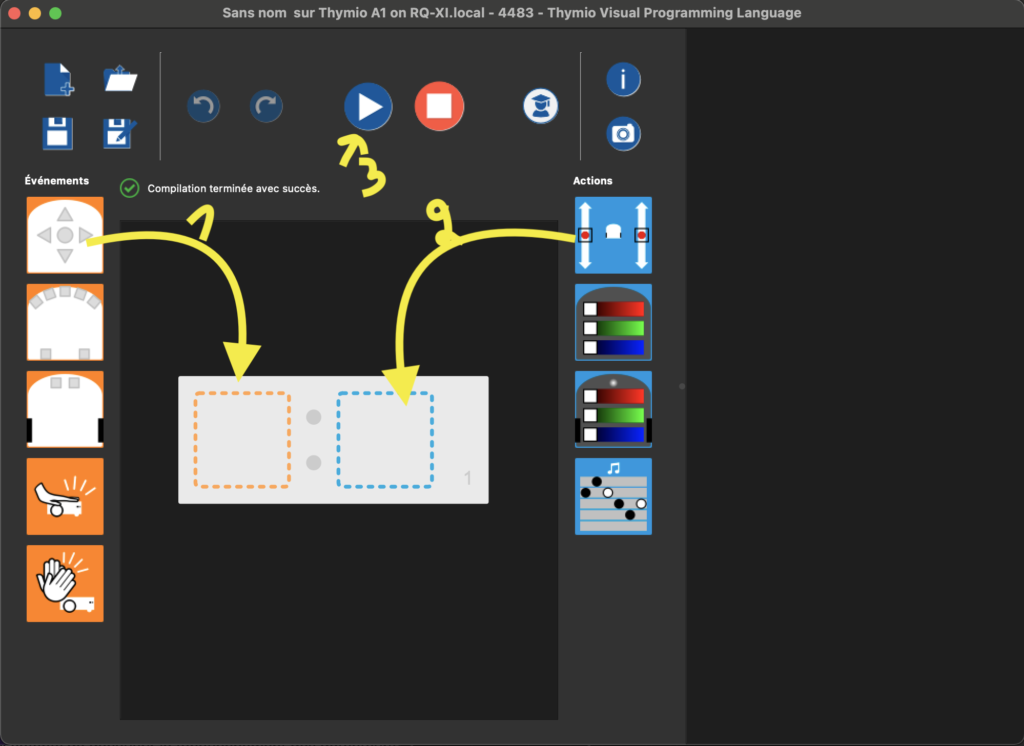
Les enfants associent ainsi les différents changements de couleurs à des évènements distincts (en l’occurrence quand on appuie sur les différentes flèches du Thymio)
On découvre que le robot possède 3 lumières LED différentes (en réalité il en possède 3, mais on se limitera ici à 2) et que les couleurs sont composées d’un mélange des couleurs rouge, de vert et bleu.
Dans l’exemple ci-dessous, nous avons programmé 3 touches, à savoir la flèche avant, la flèche arrière ainsi que le bouton central. Nous y avons associé une couleur pour le dessus du Thymio, une couleur pour le dessous ainsi que l’activation ou la désactivation des moteurs.
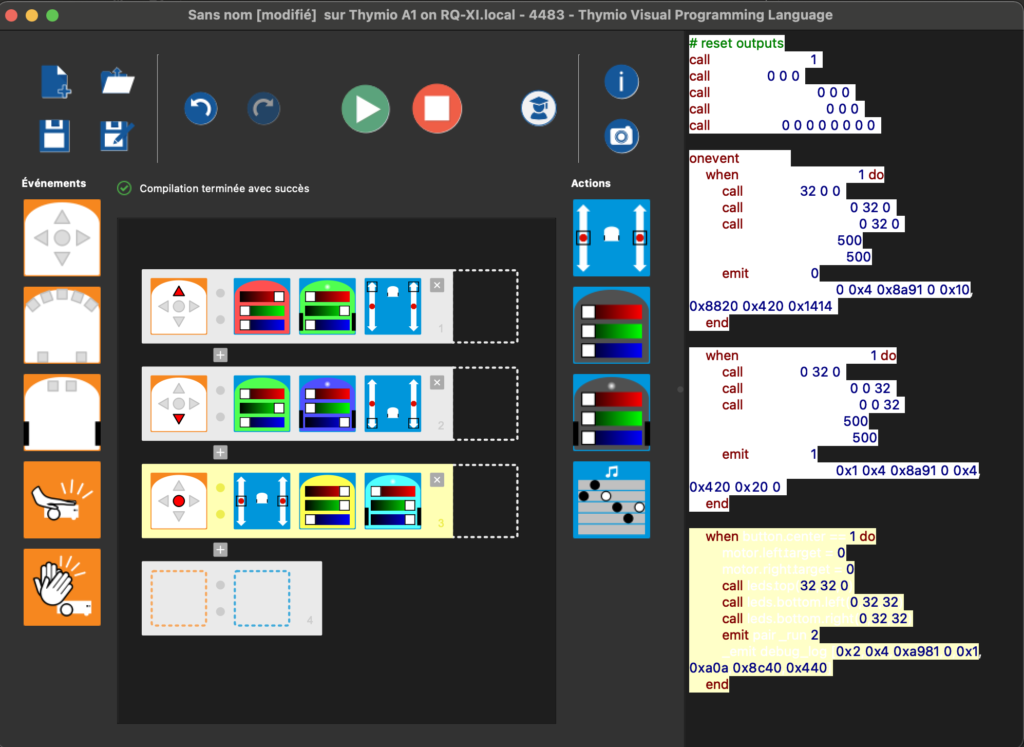
La même démarche est appliquée pour les moteurs. Le programme des couleurs est ainsi complété par des actions sur les moteurs du Thymio. Les enfants découvrent comment le faire avancer, reculer et tourner dans les 2 directions.
Idées d’activités avec les enfants
Citons pour commencer le fait d’utiliser Thymio comme un « piano ». Pour cela, les enfants devront associer un son différent à chaque détecteur, en particulier pour les détecteurs avant. Ils peuvent également y associer une couleur particulière. On peut ainsi mettre en place un spectacle son et lumières (très beau dans les classes avec des tentures épaisses)
On peut également imaginer un Thymio capable de se déplacer seul dans un labyrinthe fabriqué par les enfants, bien évidemment sans utiliser le mode « jaune » tout fait… Mais bien en programmant les détecteurs du robot.
Une autre idée, qui me vient d’un élève, inventer le mode « désobéissant » pour le Thymio. Il devra alors faire le contraire des touches… Si j’appuie sur la flèche avant, il devra reculer, si j’appuie sur la flèche de gauche, il ira à droite, et ainsi de suite. Une ou plusieurs couleurs pourront être utilisées.
Avec des 6e année, on peut également voir les pentes et se servir du gyroscope du Thymio pour le colorer dans des couleurs différentes suivant la pente sur laquelle il se situe. Une pente faible le colorera en vert, une pente moyenne l’allumera en jaune et une pente forte l’allumera en rouge. (cette leçon peut également déboucher sur une analyse de l’adhérence du robot, de l’énergie dépensée sur la pente, …)